Table of Contents
Introduction — Why Classical Control Theory Still Matters in the AI Era
Let me tell you something that most AI courses won’t. This article is part of the Scientias AI Labs research hub on Probabilistic Control Engineering for Generative AI.
When you strip away the buzzwords from modern Generative AI — the transformers, the diffusion models, the attention mechanisms — what you find underneath looks remarkably familiar to anyone who has studied classical engineering. The feedback loops are there. The stability concerns are there. The obsession with managing uncertainty is absolutely there.
I am not talking about loose metaphors. I am talking about direct, traceable intellectual borrowings that Probabilistic Control Engineering has formalized into a proper engineering discipline.
Here is why this matters to you practically. If you only know modern machine learning, you are missing a century of hard-won engineering wisdom that directly applies to the AI systems you are building. The engineers who shaped classical control theory were grappling with the same fundamental challenge you face today — how do you build reliable, well-behaved systems when the real world refuses to cooperate with your mathematical models?
PCE is their answer, updated for the age of Generative AI. And to truly understand it, you need to understand where it came from.
What is Classical Control Theory?
Before we can talk about what PCE borrowed, we need to be clear about what classical control theory actually is — because it is genuinely one of the most elegant and practically powerful bodies of engineering knowledge ever developed.
At its core, classical control theory is about one problem. You have a system that you want to behave in a certain way. The system has inputs you can control and outputs you can measure. How do you design the relationship between what you observe and what you do to get the behavior you want — especially when the system is noisy, imperfect, and constantly being disturbed by the environment?
Open Loop vs Closed Loop Systems
Here is the most important distinction in all of control theory, and once you understand it, you will start seeing it everywhere — including in AI systems you thought had nothing to do with control engineering.
Imagine you are trying to drive to a destination with your eyes closed. You know roughly how long to drive and which direction to turn, so you just execute those actions and hope for the best. That is an open loop system. No feedback. No adjustment. Just action based on your best prior estimate.
Now open your eyes. Suddenly you can see the road, measure how far you have drifted from your intended path, and continuously adjust your steering to stay on course. That is a closed loop system. You are constantly measuring the gap between where you are and where you want to be, and using that measurement to correct your behavior.
The difference between these two approaches is not subtle — it is the difference between a system that works reliably in the real world and one that falls apart the moment reality deviates from your model.
Transfer Functions
Think of a transfer function as a system’s personality profile. Feed any input into a system and the transfer function tells you exactly what output will come out — not just for one specific input, but for any input you can imagine, expressed in terms of frequency components.
Control engineers love transfer functions because they reveal things about a system that are completely invisible when you just watch its behavior in the time domain. They tell you which frequencies a system amplifies, which it filters out, and critically, whether the system is going to stay stable or eventually blow up.
PID Controllers
If there is one tool that every engineer should understand regardless of their specialty, it is the PID controller. Proportional. Integral. Derivative. Three terms, each addressing a different aspect of the gap between where your system is and where you want it to be.
The proportional term is reactive — it responds to the current error right now. The integral term is historical — it accumulates all the past errors to prevent the system from settling at a persistent offset. The derivative term is anticipatory — it looks at how fast the error is changing and tries to get ahead of it.
What makes PID controllers so remarkable is not their mathematical sophistication — they are actually quite simple. What makes them remarkable is how well those three terms map onto the three fundamental questions you always need to ask about any system’s behavior: what is happening right now, what has been happening over time, and where is this heading?
System Stability
Stability might be the single most important concept in control engineering. A stable system, when disturbed, finds its way back to where it wants to be. An unstable system, when disturbed, runs away from where it wants to be — oscillating with increasing amplitude or diverging entirely.
Stability sounds like an abstract mathematical concern until you watch an unstable system in action. A temperature controller that overshoots, corrects too aggressively, overshoots in the other direction, and spirals into wild temperature swings is an unstable system. A robot arm that oscillates uncontrollably rather than stopping at its target position is an unstable system.
In AI, unstable training — where loss oscillates wildly rather than converging — is exactly the same phenomenon wearing different clothes.
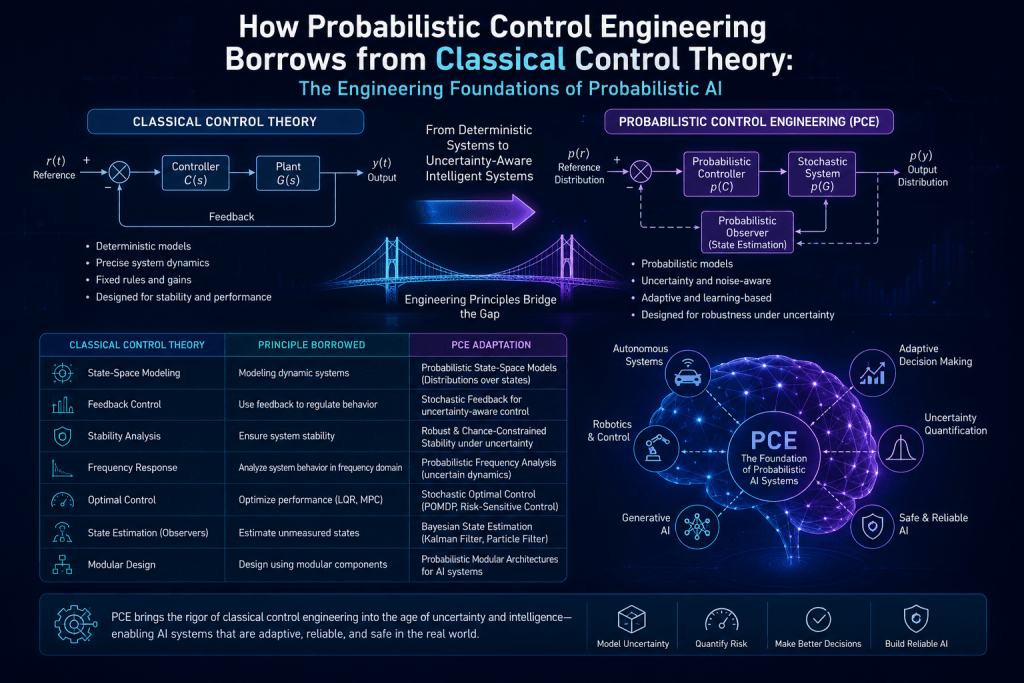
What is PCE and Where Does It Come From?
Here is the honest story of PCE’s origins.
Classical control theory was built for a world of deterministic systems. You could write down equations of motion. You could characterize your noise statistically. You could design controllers with formal performance guarantees.
Then AI came along and blew up every one of those assumptions.
Language models do not have equations of motion. Their noise is not Gaussian. Their performance objectives — be helpful, be accurate, be creative, don’t say harmful things — resist precise mathematical formalization. And they operate in input spaces so high-dimensional that classical control tools simply cannot scale to them directly.
PCE emerged from engineers and researchers who refused to abandon the rigorous engineering mindset of classical control theory just because the systems had gotten messier. They kept the framework — the feedback loops, the stability analysis, the probabilistic treatment of uncertainty — and rebuilt the mathematical tools from scratch to handle the scale and complexity of modern AI.
The result is a discipline that feels like classical control theory in its intellectual structure but speaks the language of Bayesian inference, deep learning, and stochastic processes.
The Direct Borrowings — Classical to Probabilistic
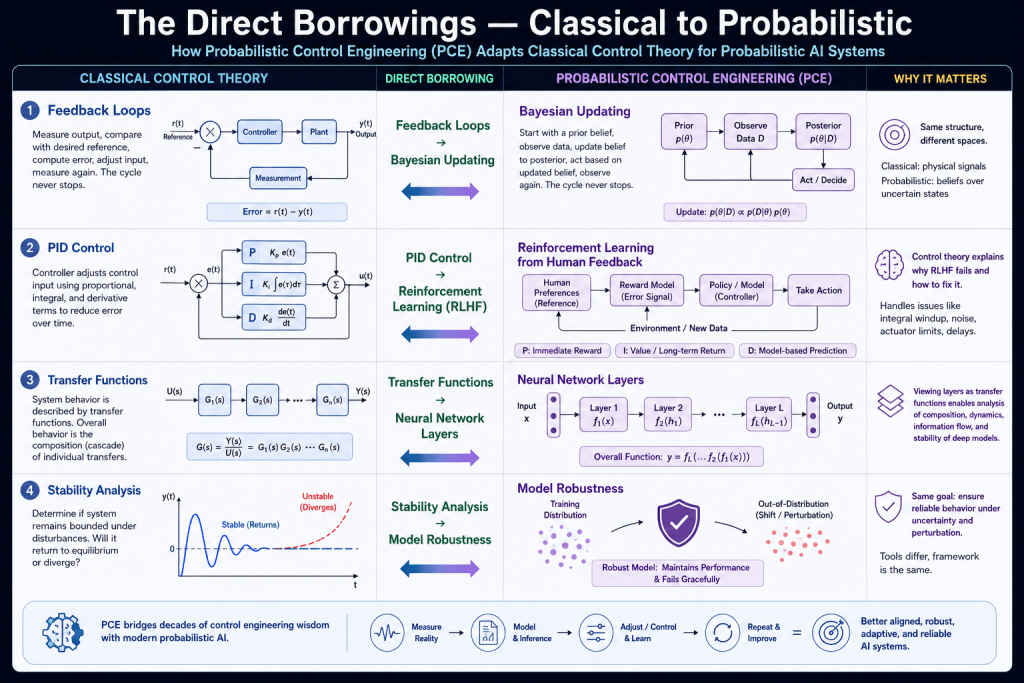
Feedback Loops → Bayesian Updating
Let me walk you through something that I think is genuinely beautiful once you see it.
A classical feedback loop works like this. You measure your system’s output. You compare it to where you want the output to be. You compute the error — the gap between reality and desire. You adjust your input to reduce that error. Then you measure again. The cycle never stops.
Now think about Bayesian updating. You start with a belief about the world — your prior. You observe something new — data from the environment. You update your belief to incorporate what you just learned — the posterior. You act based on your updated belief. Then you observe again and update again.
The structure is identical. Both are about continuously measuring reality, comparing it to your current model, and adjusting. The classical feedback loop does this in the space of physical measurements and control signals. Bayesian updating does it in the space of probability distributions over possible states of the world.
This is not a loose analogy. PCE practitioners who deeply understand feedback control find Bayesian inference intuitive in a way that pure statisticians often do not, because they already think in terms of continuous measurement-correction cycles.
PID Control → Reinforcement Learning
I want to be careful here because this connection is sometimes overstated. But at its core, the parallel is real and practically useful.
When you do Reinforcement Learning from Human Feedback, you are implementing a feedback control loop. The human preferences define the target behavior — the reference signal in control language. The reward model measures how far the current model behavior is from that target — the error signal. The policy optimization process adjusts model parameters to reduce that error — the controller.
The proportional component shows up in immediate reward signals that push the policy toward better current behavior. The integral component appears in value functions that accumulate discounted future rewards — preventing the policy from optimizing for short-term gains at the cost of long-term performance. The derivative component emerges in model-based approaches that predict future consequences before acting.
What makes this practically useful is that classical control theory has decades of analysis about why feedback controllers fail — integral windup, sensor noise, actuator saturation, time delays. Every one of those failure modes has a direct analogue in RLHF, and recognizing that connection gives you a head start on diagnosing and fixing alignment problems.
Transfer Functions → Neural Network Layers
Here is a way of thinking about neural networks that most deep learning courses never mention.
Each layer of a neural network transforms its input into an output through a learned function. Stack enough of those transformations together and you get a network capable of approximating extraordinarily complex relationships between inputs and outputs.
From a classical control perspective, each layer is a transfer function — a mathematical description of how that layer transforms its input. The composition of layers is the composition of transfer functions. The network’s overall behavior is determined by the cascade of these transformations, just like a control system’s overall behavior is determined by the cascade of its component transfer functions.
This perspective is not just aesthetically satisfying — it is practically useful. Frequency domain analysis of neural network layers reveals why very deep networks can struggle to propagate gradient signals backward, why certain layer configurations are more stable than others, and why specific architectural choices lead to better generalization.
Stability Analysis → Model Robustness
When a classical control engineer asks whether a system is stable, they are asking a very precise question with a very precise mathematical answer. Given this system, given these disturbances, will the output remain bounded? Will the system return to its operating point after a disturbance, or will it diverge?
When a PCE practitioner asks whether an AI model is robust, they are asking an analogous question in a more complex setting. Given this model, given these distribution shifts between training and deployment, will performance remain acceptable? Will the model fail gracefully or catastrophically when it encounters inputs outside its training distribution?
The tools are different — you cannot directly apply Bode plots to a transformer model — but the intellectual framework is identical. You are analyzing system behavior under perturbation and designing mechanisms to ensure stability. Gradient clipping, dropout, weight decay, learning rate scheduling — these are all stability mechanisms that a PCE practitioner understands through the lens of classical control theory.
How Feedback Control Became Bayesian Inference
Most people do not know that the mathematical connection between feedback control and Bayesian inference has a specific historical origin.
During World War II, Norbert Wiener was working on the problem of predicting the future position of enemy aircraft for anti-aircraft fire control. The problem was fundamentally statistical — the aircraft’s position was observed with noise, and you needed to extract the best possible estimate of its true position and trajectory from those noisy observations.
Wiener’s solution — the Wiener filter — turned out to be mathematically equivalent to Bayesian estimation under Gaussian assumptions. A control engineer minimizing mean squared error and a statistician computing a Bayesian posterior under a Gaussian prior were, it turned out, doing exactly the same computation from two different intellectual directions.
This historical convergence is not a coincidence. It reflects something deep about the nature of the problem. Whether you frame it as feedback control or as probabilistic inference, you are fundamentally trying to use imperfect observations of reality to make better decisions. The mathematics that works for one works for the other.
PCE practitioners sit consciously at this intersection, using Bayesian inference as the natural probabilistic generalization of the feedback loops that classical control engineers pioneered.
State Space Representation in Classical vs PCE Systems
One of the most elegant ideas in classical control theory is the state space representation. Rather than describing a system purely by what goes in and what comes out, you describe its internal state — everything you need to know about the system right now to predict its future behavior — and how that state evolves over time.
A classical state space model has two equations. The state transition equation tells you how the current state and current input produce the next state. The observation equation tells you how the current state produces the observable output.
This works beautifully for deterministic systems. But real systems are not deterministic. Sensors are noisy. Actuators are imprecise. The environment introduces unexpected disturbances.
PCE’s solution is to make the state space model probabilistic. Instead of a single state vector, you maintain a probability distribution over possible states. Instead of a deterministic state transition, you have a transition probability distribution — given the current state and input, what is the probability of each possible next state? Instead of a deterministic observation, you have an observation probability distribution — given the current state, what observations are you likely to see?
This probabilistic state space model is the foundation of Hidden Markov Models, Kalman filters, and particle filters. It is one of the most direct and traceable borrowings from classical control theory into the probabilistic AI world.
Stability Theory — From Lyapunov to Neural Network Robustness
Aleksandr Lyapunov solved one of the deepest problems in classical mechanics in the 1890s — how do you prove that a dynamical system is stable without having to solve its equations of motion exactly?
His answer was elegant. Find a function of the system state that is always positive and always decreasing along the system’s trajectories. If such a function exists, the system must eventually converge to the equilibrium — it cannot diverge, because the Lyapunov function would have to increase, which by construction it cannot do.
Now think about neural network training. When a loss function decreases reliably over training iterations, you have something that looks remarkably like a Lyapunov function. The training process is stable in the Lyapunov sense if the loss is a valid Lyapunov function for the training dynamics.
This is not just philosophical hand-waving. Researchers in AI safety literally use Lyapunov-based analysis to design neural network controllers for physical systems that come with formal stability guarantees. And PCE practitioners use Lyapunov-inspired thinking informally every time they ask whether a training process will converge reliably — they are asking whether the training dynamics are Lyapunov-stable.
Observability and Controllability in Generative AI
Two classical control concepts that do not get nearly enough attention in AI discussions are observability and controllability.
Observability asks: can you figure out what is happening inside a system from what you can measure on the outside? A fully observable system is one where external measurements give you complete information about the internal state.
Controllability asks: can you drive the system from any starting state to any desired ending state using the inputs available to you? A fully controllable system is one where you have complete authority over its trajectory.
In Generative AI, these questions become: can you figure out what a model is doing internally from its outputs? And can you reliably steer a model’s behavior toward any desired outcome through prompting or fine-tuning?
The first question is interpretability. The second is alignment. Both are among the most urgent open problems in AI safety and reliability. And both are, at their core, classical control theory questions — dressed in modern AI language but asking exactly the same fundamental things that control engineers have been asking since the 1960s.
The Kalman Filter — Bridge Between Classical Control and PCE
If I had to pick one algorithm that most perfectly embodies the connection between classical control and probabilistic AI, it would be the Kalman filter without hesitation.
Rudolf Kalman published it in 1960, and it is still being used — in spacecraft navigation, in autonomous vehicles, in financial modeling, and increasingly in AI systems — more than six decades later. That kind of longevity in engineering is extraordinarily rare, and it reflects how fundamentally right the underlying idea is.
The Kalman filter maintains a Gaussian probability distribution over possible system states. At each time step, it does two things. First, it predicts — using the system’s dynamics model to propagate the current state distribution forward in time, accounting for the uncertainty that accumulates as the system evolves. Second, it updates — using a new noisy observation to refine the state estimate through Bayes’ theorem, trading off the prediction’s uncertainty against the observation’s uncertainty to get the best possible estimate.
The prediction step is pure classical control theory — it uses the state space model to propagate states forward in time. The update step is pure Bayesian inference — it uses Bayes’ theorem to combine prior beliefs with new evidence.
The Kalman filter is where classical control and Bayesian inference literally meet in the same algorithm. Understanding it deeply is perhaps the single most valuable thing a PCE practitioner can do to internalize the intellectual connection between these two traditions.
PID Controllers vs RLHF — Surprising Similarities
I want to spend a moment on something that surprised me when I first worked through it carefully.
Reinforcement Learning from Human Feedback and PID control are more structurally similar than most people in the AI community realize.
In RLHF, human annotators provide feedback on model outputs, expressing preferences between different responses. That feedback is used to train a reward model. The reward model is then used to fine-tune the base language model through reinforcement learning, nudging its behavior toward outputs that the reward model rates highly.
Now map that onto PID control. The human preferences are the reference signal — they define the desired system behavior. The reward model is the error sensor — it measures how far the current behavior is from the desired behavior. The RL fine-tuning process is the controller — it adjusts system parameters to reduce the measured error.
And the failure modes map directly too. Reward hacking — where the model learns to game the reward model rather than actually improving — is analogous to integral windup in a PID controller, where the integral term accumulates to the point where it causes the system to overshoot wildly. Mode collapse is an instability phenomenon. Reward model overfitting is sensor noise that corrupts the feedback signal.
Classical control engineers spent decades developing techniques to prevent these failure modes in physical systems. PCE practitioners carry that knowledge into AI alignment work.
Frequency Domain Analysis vs Attention Mechanisms
Classical control engineers love the frequency domain because it reveals things about system behavior that are completely invisible in the time domain. A system that looks well-behaved in time domain can have resonances — frequencies where it amplifies inputs dramatically — that only show up in frequency domain analysis.
The attention mechanism in transformer models has a genuinely interesting connection to this frequency domain perspective. Attention computes a weighted sum of value vectors, where the weights depend on the similarity between query and key vectors. From a signal processing perspective, this is a learned, content-dependent filtering operation — it selectively amplifies patterns in the input that are relevant to the current query while attenuating irrelevant patterns.
Researchers who have analyzed transformer attention through a frequency domain lens have found that different attention heads specialize in capturing patterns at different scales — some attending to local, high-frequency patterns like individual words, others attending to global, low-frequency patterns like document-level themes. This is strikingly similar to a bank of bandpass filters in classical signal processing.
Where Classical Control Theory Ends and PCE Begins
I want to be honest about the limits of the classical control framework, because pretending those limits do not exist would be doing you a disservice.
Classical control theory is extraordinarily powerful for systems that are linear or mildly nonlinear, have well-characterized dynamics, operate in relatively low-dimensional state spaces, and pursue performance objectives that can be expressed mathematically with precision.
Generative AI systems violate every single one of those conditions. A language model operates in billions of dimensions. Its dynamics — the way its outputs depend on its inputs — are highly nonlinear and only partially understood even by the people who built it. Its performance objectives — be helpful, be accurate, be safe, be creative — resist precise mathematical formalization in ways that, say, “maintain temperature within 0.5 degrees of setpoint” does not.
So PCE is not classical control theory applied directly to AI. It is the intellectual framework of classical control theory — the commitment to rigorous analysis, the focus on feedback and stability, the probabilistic treatment of uncertainty — rebuilt with new mathematical tools suited to the scale and complexity of modern AI. New tools like variational inference, deep learning, Monte Carlo methods, and probabilistic programming. But the same fundamental engineering mindset.
Why PCE Practitioners Must Understand Classical Control
Here is the honest argument for why you should care about classical control theory as an AI engineer.
It is not because you will be designing PID controllers. You probably will not. It is not because Bode plots will come up in your day job. They probably will not either.
The argument is that classical control theory trains a specific kind of engineering thinking that is difficult to develop any other way. It forces you to ask precise questions about system behavior. Not “does this model work” but “under what conditions does it work, how does it degrade when those conditions are violated, and how can I design it to degrade gracefully rather than catastrophically?”
That kind of thinking is exactly what is missing from a lot of AI engineering work. Models get deployed without systematic analysis of their failure modes. Training procedures get adopted without understanding their stability properties. Alignment techniques get applied without rigorous analysis of what could go wrong.
PCE practitioners who have internalized classical control thinking bring a different quality of rigor to these problems. They ask the right questions — and they have the mathematical vocabulary to answer them.
Real World Examples of Classical Control Concepts in Generative AI
Let me ground all of this in concrete examples you can point to in real systems.
Gradient clipping in neural network training is a stability mechanism straight out of classical control. When gradients explode — the neural network equivalent of a runaway control signal — clipping them prevents the training dynamics from going unstable. Every deep learning framework implements this, but most practitioners use it without thinking about why it works in control-theoretic terms.
The noise schedule in diffusion models is essentially a transfer function that shapes how information flows through the generation process. Researchers who think about it in frequency domain terms design better schedules — understanding how different noise levels correspond to different frequency components of the image being generated.
RLHF in language models implements a feedback control loop where human preferences drive model behavior toward a target distribution. The reward model is the sensor, the RL optimizer is the controller, and the language model is the plant being controlled.
Kalman filter-based sensor fusion in autonomous vehicles is perhaps the most direct application — classical Kalman filtering, barely modified, being used in production self-driving systems to fuse noisy measurements from cameras, LiDAR, and radar into reliable state estimates.
Future — Will PCE Replace Classical Control Engineering?
Short answer — no, and that is not even the right question.
Classical control engineering is not going anywhere. Power grids, manufacturing processes, aerospace systems, industrial robotics — all of these depend on classical control and will continue to for the foreseeable future. The mathematical tools are perfectly matched to those problems, and there is no reason to replace them with probabilistic AI methods when the classical approach works better.
What is changing is the boundary. AI is being applied in domains that classical control theory was never designed for — natural language, creative generation, complex reasoning, autonomous decision-making in unstructured environments. In those domains, PCE provides the engineering framework that classical control theory cannot.
The most valuable engineers of the next decade will be comfortable in both worlds. They will know when to apply classical control theory and when to reach for probabilistic AI tools. They will be able to design a Kalman filter and implement a variational autoencoder. They will understand Lyapunov stability and neural network robustness as related concepts rather than unconnected specialties.
That fluency across both traditions is what defines a PCE practitioner at their best.
Conclusion
I started this article by saying that the fingerprints of classical control theory are all over Probabilistic Control Engineering. I hope by now you can see exactly what I meant.
Feedback loops became Bayesian inference. PID control became reinforcement learning. State space models became Hidden Markov Models and particle filters. Lyapunov stability became neural network robustness analysis. Observability and controllability became interpretability and alignment.
None of these are superficial analogies. They are genuine intellectual inheritances — ideas that were developed in one context, proved their value, and were carried forward and adapted as the problems evolved.
If you are building Generative AI systems and you have never studied classical control theory, you are working with half the intellectual toolkit you need. The problems you are solving — how to build reliable, well-behaved systems that work in a messy, uncertain, constantly-changing world — are exactly the problems that classical control engineers have been solving for a century.
Their answers are worth knowing.
What is the main connection between classical control theory and PCE?
Classical control theory provides the foundational intellectual framework that PCE builds upon. The feedback loop became Bayesian inference. The PID controller became reinforcement learning. The state space model became the Hidden Markov Model. PCE did not invent a new way of thinking — it extended and modernized a century of control engineering wisdom to handle the uncertainty and complexity of modern Generative AI systems.
Do I need to study classical control theory to become a PCE practitioner?
Technically no — but practically yes. You can work with probabilistic AI tools without understanding their control theory roots. But engineers who understand classical control theory ask better questions, diagnose problems faster, and design more robust systems. The investment in learning classical control fundamentals pays dividends throughout your entire AI engineering career.
How does a PID controller relate to reinforcement learning?
The structural parallel is surprisingly direct. Human preferences in RLHF play the role of the reference signal. The reward model plays the role of the error sensor. The policy optimizer plays the role of the controller. The proportional term maps to immediate rewards, the integral term maps to value functions, and the derivative term maps to model-based prediction. Even the failure modes — reward hacking, mode collapse, reward model overfitting — map directly to classical PID failure modes like integral windup and sensor noise.
What is the Kalman filter and why does it matter for PCE?
The Kalman filter is arguably the single most important bridge between classical control theory and probabilistic AI. Developed in 1960, it maintains a Gaussian probability distribution over possible system states and updates that distribution as new observations arrive — combining classical state space prediction with Bayesian inference in one elegant algorithm. It is still used in production AI systems today, from autonomous vehicles to financial modeling, making it one of the most enduring algorithms in engineering history.
What does Lyapunov stability theory have to do with neural networks?
Lyapunov stability theory gives engineers a way to prove that a dynamical system will converge to a stable state without solving its equations of motion directly. In neural network training, a consistently decreasing loss function behaves like a Lyapunov function — it is evidence that the training dynamics are stable. PCE practitioners use Lyapunov-inspired thinking to analyze training stability and design neural network controllers for physical systems that come with formal mathematical stability guarantees.
How are observability and controllability relevant to Generative AI?
Observability in AI is essentially the interpretability problem — can you determine what a model is doing internally from its outputs? Controllability in AI is essentially the alignment problem — can you reliably steer a model’s behavior toward any desired outcome? Both are classical control theory concepts applied to modern AI challenges, and framing them this way connects decades of control engineering research to some of the most urgent open problems in AI safety.
Is frequency domain analysis really applicable to transformer attention mechanisms?
Yes, in a genuinely meaningful way. Research has shown that different attention heads in transformer models specialize in capturing patterns at different scales — some focusing on local word-level patterns, others on global document-level themes. This is structurally analogous to a bank of bandpass filters in classical signal processing. Engineers who think about attention in frequency domain terms gain insights into model behavior that pure empirical approaches miss.
Why did Bayesian inference and feedback control converge mathematically?
The convergence has deep roots. Norbert Wiener’s work on optimal filtering for anti-aircraft fire control during World War II produced the Wiener filter — which turned out to be mathematically identical to Bayesian estimation under Gaussian assumptions. A control engineer minimizing mean squared error and a statistician computing a Bayesian posterior were doing the same computation from different intellectual traditions. PCE sits consciously at this intersection.
Will classical control engineering become obsolete as AI advances?
Not at all. Classical control engineering remains the right tool for deterministic physical systems — power grids, manufacturing, aerospace, industrial robotics. These domains are not going away. What is changing is the boundary of where AI methods are applied. The most valuable engineers of the coming decade will be fluent in both traditions — knowing when classical control theory is the right tool and when probabilistic AI methods are needed.
How does gradient clipping in neural network training relate to classical control?
Gradient clipping is a stability mechanism in exactly the classical control sense. When gradients explode during training — growing without bound and causing chaotic parameter updates — it is the neural network equivalent of a runaway control signal. Clipping gradients prevents the training dynamics from going unstable, just like a classical controller would prevent a physical system from diverging. Most deep learning practitioners use gradient clipping without thinking about it this way, but the control theory interpretation explains precisely why it works.